|
Hx19 RFID Ultrasonic Positioning (no wires)
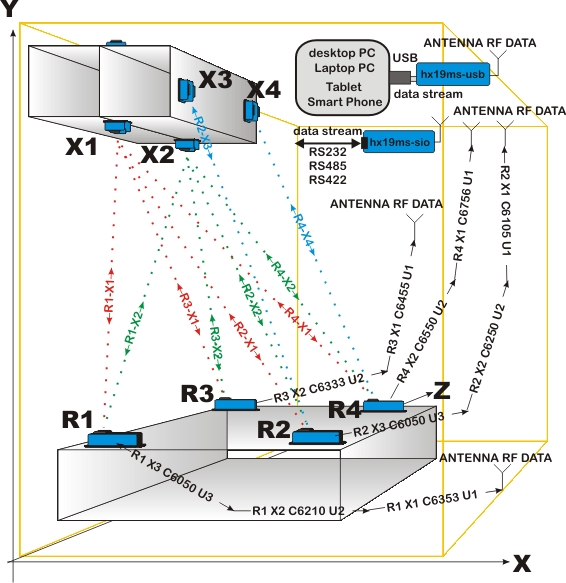
One positioning application of many, is illustrated below. Objects are positioned and oriented relative to each other. The streaming data is emitted from the hx19 receivers R1, R2, R3 and R4 over a radio frequency channel in the 2.4GHZ range. This is a simplex operation, where the hx19ms synchronizes the surrounding devices, both transmitters and receivers. Internal processors of the receivers, time the flight of the ultrasonic signals. Positioning data becomes available through a USB, or a serial port for processing using a PC, laptop, palmtop, tablet, a smart phone or any device able to read serial data.
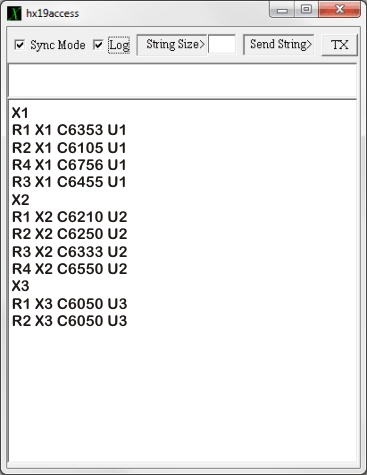
Newest versions of the hx19 have semi-calibrated output at 25 degrees centigrade, and the distance value is in millimeters. The character string from the receiver, is received by the hx19ms, and comes streaming through its USB port. Hx19access program, captures the stream and displays as shown below. This data can be manipulated, using any programming language. Hexamite provides the source-code for the hx19access to make programming work easier. Referring to the image above, by default all devices are tuned to the same channel, or channel 2. Thus the hx19ms receives only that which is transmitted on channel 2. Each device can be instructed by the user to transmit or receive on a channel of choice, there are 127 channels available.
The leading X1 in the first line, represents the transmitter emitting the consequent timed results. X1 Values following C represent distance and are in millimeters. Transmitter emission e.g. X1 is also picked up by the receivers
hx19r. At the arrival of X1 the receiver clears its timer, and starts counting. the count is stopped when the USID U1 arrives. The timing is converted to millimeters based on speed of sound at room temperature.
Hexamite provides a program hx19xyzDDE that acts as a 3D computational server, converting distances into 3D Cartesian coordinates, and making coordinates and accurate timing available through DDE (Dynamic Data Exchange). See Application 2. Configuration issues. Unchanged default factory settings should suffice for this application, no additional configuration should be required. Select the Sync Mode option on the hx19access, and distance data should be streaming through the USB port. For educational purposes view the following configuration instructions. Use the access program. Type the command M1& m0 r2 t2 p3, and click the TX button to send the command from the PC to the synchronizer. This command sequence puts the synchronizer into mode 0; where it broadcasts all, except that which is addressed to it specifically. It receives RF on channel 2 and transmits RF on channel 2 at maximum power.
If the receivers are running battery mode, the devices are likely asleep. To awaken the devices select hx19access Sync Mode and wait. It can take up to 16 seconds for the tags (transmitters), and 40 seconds for the receivers to come up. Given that the LED indicator on the devices have not been disabled. The LED on the transmitter or the receiver should flash in harmony with the sync, by default 16 flashes per second. Once all the LEDs are flashing, you can configure the devices. If receivers are not in battery mode, they can be configured with or without the Sync Mode. Once the transmitter has been awakened, and its enabled LED is flashing. Sending T&m7t2r2p3 [got | it] will place these; the same default settings loaded during startup, back into the work registers.
The communication is simplex, i.e. the device cannot receive while transmitting Reversing the systemThe hx19 is mostly shown as a tracking system where receivers in a fixed position report the distance to a single tag transmitter moving within the space. It is possible to reverse this system so that the tag transmitters are in a fixed position and the receivers are on the moving object reporting the distance to each transmitter. We refer to this as a guidance system, slightly different receivers are required for a guidance system these receivers are identical to the tracking receivers except they have a ttl serial output pin, from which the distances to the tags are streaming. The information provided here should shed some light on the hx19. Query and comments and always welcome, at: service@hexamite.com |
 Distance
show here is fabrication for demo purposes and is unrelated to the image above.
Distance
show here is fabrication for demo purposes and is unrelated to the image above.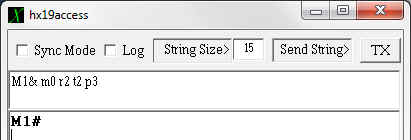 Given that the identity of the synchronizer is M1. M1# is the synchronizer’s execution acknowledge.
Given that the identity of the synchronizer is M1. M1# is the synchronizer’s execution acknowledge.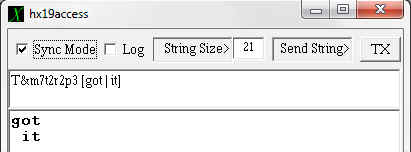 T&m6 will turn the flashing LED down, and T&m7 will turn the LED back on. This for the skeptic, is further verification that an actual transmitter communication is taking place. Since the address is general or ‘T’ all transmitters in range must comply.
T&m6 will turn the flashing LED down, and T&m7 will turn the LED back on. This for the skeptic, is further verification that an actual transmitter communication is taking place. Since the address is general or ‘T’ all transmitters in range must comply.